Surface (géométrie analytique)
En géométrie analytique, on représente les surfaces, c'est-à-dire les ensembles de points sur lequel il est localement possible de se repérer à l'aide de deux coordonnées réelles, par des relations entre les coordonnées de leurs points, qu'on appelle équations de la surface
ou par des représentations paramétriques.
Cet article étudie les propriétés des surfaces que cette approche (appelée souvent extrinsèque) permet de décrire. Pour des résultats plus approfondis, voir Géométrie différentielle des surfaces.
Sommaire
1 Propriétés affines
1.1 Représentation paramétrique
1.2 Équation d'une surface
1.3 Plus de précisions
1.4 Exemples
1.5 Courbes coordonnées
1.6 Courbe tracée sur une surface
1.7 Tangentes et plan tangent à une surface
2 Propriétés métriques
2.1 Normale à une surface
2.2 Intersection de deux surfaces
3 Voir aussi
3.1 Bibliographie
3.2 Articles connexes
Propriétés affines |
On suppose dans tout cet article qu'on a muni l'espace d'un repère, dans lequel sont exprimées toutes les coordonnées.
Représentation paramétrique |
Une nappe paramétrée est la donnée de trois fonctions de deux variables (définies sur un disque ouvert, un rectangle ou
plus généralement un ouvert de R2{displaystyle mathbb {R} ^{2}}
x=f(u,v),y=g(u,v)z=h(u,v){displaystyle x=f(u,v),,y=g(u,v),z=h(u,v)}.
qui représentent les coordonnées d'un point M par rapport à un repère (O,i→,j→,k→){displaystyle (O,{overrightarrow {i}},{overrightarrow {j}},{overrightarrow {k}})}

On a envie de dire qu'une surface est l'image d'une nappe paramétrée. Mais quelques précautions sont nécessaires : si on prend f(u,v)=u, g(u,v)=h(u,v)=0 on a une nappe paramétrée dont l'image est une droite.
Dans le cas où F→=(f,g,h){displaystyle {overrightarrow {F}}=(f,g,h)}
Un cas particulier important de nappe paramétrée est celui du graphe d'une fonction de deux variables :
lorsque x=u,y=v,z=h(u,v){displaystyle x=u,y=v,z=h(u,v)}

Équation d'une surface |
Étant donnée une fonction H de trois variables, l'ensemble des points M dont les coordonnées, dans le repère que l'on s'est donné
vérifientH(x,y,z)=0 est une surface.
Lorsqu'au voisinage d'un point (x0,y0,z0){displaystyle (x_{0},y_{0},z_{0})}


Plus de précisions |
Si on se contente des points de vue qui précèdent, on obtient des exemples qu'il vaudrait mieux exclure (cf. la nappe (u,v)↦(u,0,0){displaystyle (u,v)mapsto (u,0,0)}
Une nappe paramétrée F→=(f,g,h){displaystyle {overrightarrow {F}}=(f,g,h)}
F→{displaystyle {overrightarrow {F}}}est de classe C1{displaystyle C^{1}}
- les vecteurs ∂F→∂u{displaystyle {frac {partial {overrightarrow {F}}}{partial u}}}
et ∂F→∂v{displaystyle {frac {partial {overrightarrow {F}}}{partial v}}}
sont partout linéairement indépendants.
Exemples
- La nappe paramétrée associée à une surface d'équation cartésienne z=h(x,y) est régulière (si h est C1{displaystyle C^{1}}
)
- Si F est C1{displaystyle C^{1}}
, alors F−1(0){displaystyle F^{-1}(0)}
En fait, un cas particulier du théorème des fonctions implicites est le résultat suivant.
Théorème — Pour une partie S⊂R3{displaystyle Ssubset mathbb {R} ^{3}}
- Pour tout M∈S{displaystyle Min S}
il existe un ouvert U de R3{displaystyle mathbb {R} ^{3}}
tel que U∩S{displaystyle Ucap S}
soit l'image d'une nappe paramétrée régulière.
- Pour tout M∈S{displaystyle Min S}
soit (après permutation des coordonnées au besoin) le graphe d'une fonction C1{displaystyle C^{1}}
En pratique, les surfaces que l'on étudie sont le plus souvent des réunions d'image de nappes régulières. Quand ce n'est pas le cas, on regarde au cas par cas.
Exemples |
- La sphère de centre O et de rayon 1 a pour équation x2+y2+z2=1{displaystyle x^{2}+y^{2}+z^{2}=1}
. On peut aussi considérer la nappe paramétrée
(u,v)↦(cosucosv,sinucosv,sinv){displaystyle (u,v)mapsto (cos ucos v,sin ucos v,sin v)}

qui est régulière et injective sur [0,2π[×]−π2,π2[{displaystyle [0,2pi [times ]-{frac {pi }{2}},{frac {pi }{2}}[}![[0,2pi[times ]-frac{pi}{2}, frac{pi}{2}[](https://wikimedia.org/api/rest_v1/media/math/render/svg/55503033189eb261c456cff690fc4039f7a0ecb6)

- l'équation z2=x2+y2{displaystyle z^{2}=x^{2}+y^{2}}
représente le cône de révolution d'axe Oz et d'angle π4{displaystyle {frac {pi }{4}}}
.
C'est l'image de la nappe paramétrée
(r,θ)↦(rcosθ,rsinθ,r){displaystyle (r,theta )mapsto (rcos theta ,rsin theta ,r)}

qui est régulière si r≠0{displaystyle rnot =0}
- une surface de révolution d'axe Oz peut être réalisée par une équation de la forme F(r,z)=0{displaystyle F(r,z)=0}
(avec r=x2+y2{displaystyle r={sqrt {x^{2}+y^{2}}}}
) ou une nappe paramétrée (r,θ)↦(rcosθ,rsinθ,f(r)){displaystyle (r,theta )mapsto left(rcos theta ,rsin theta ,f(r)right)}
.
Courbes coordonnées |

Représentation des courbes coordonnées d'une surface S.
Soit S la surface définie par OM→=F→(u,v){displaystyle {overrightarrow {OM}}={overrightarrow {F}}(u,v)}



Quand v0{displaystyle v_{0}}


Le même procédé vaut pour la définition des courbes Cu0{displaystyle C_{u_{0}}}

Courbe tracée sur une surface |
Elle est définie par une application t↦f(u,v){displaystyle tmapsto f(u,v)}
OM→=F→(u(t),v(t)){displaystyle {overrightarrow {OM}}={overrightarrow {F}}(u(t),v(t))}, contenue dans S et dite tracée sur S.
Tangentes et plan tangent à une surface |
On appelle tangente à une surface S au point M0{displaystyle M_{0}}
Soit f{displaystyle f}




Si les vecteurs ∂M→∂u{displaystyle {frac {overrightarrow {partial M}}{partial u}}}
sont dans le plan passant par M0{displaystyle M_{0}}
C'est par définition le plan tangent à S{displaystyle S}
Soit un plan tangent défini par le point M0(x0,y0,z0){displaystyle M_{0}(x_{0},y_{0},z_{0})}
∂M→∂u0=(∂x∂u0,∂y∂u0,∂z∂u0){displaystyle {frac {overrightarrow {partial M}}{partial u_{0}}}=left({frac {partial x}{partial u_{0}}},{frac {partial y}{partial u_{0}}},{frac {partial z}{partial u_{0}}}right)}, et
- ∂M→∂v0=(∂x∂v0,∂y∂v0,∂z∂v0){displaystyle {frac {overrightarrow {partial M}}{partial v_{0}}}=left({frac {partial x}{partial v_{0}}},{frac {partial y}{partial v_{0}}},{frac {partial z}{partial v_{0}}}right)}

Son équation est :
- |x−x0∂x∂u0∂x∂v0y−y0∂y∂u0∂y∂v0z−z0∂z∂u0∂z∂v0|=0{displaystyle {begin{vmatrix}x-x_{0}&{frac {partial x}{partial u_{0}}}&{frac {partial x}{partial v_{0}}}\y-y_{0}&{frac {partial y}{partial u_{0}}}&{frac {partial y}{partial v_{0}}}\z-z_{0}&{frac {partial z}{partial u_{0}}}&{frac {partial z}{partial v_{0}}}end{vmatrix}}=0,}

Par exemple si l'équation de S{displaystyle S,}

p=hx′(x0,y0),{displaystyle p=h_{x}^{prime }(x_{0},y_{0}),}

z−z0=p(x−x0)+q(y−y0){displaystyle z-z_{0}=p(x-x_{0})+q(y-y_{0}),}

Si l'équation de S{displaystyle S,}
Par exemple si fz′(x0,y0,z0)≠0{displaystyle f_{z}^{prime }(x_{0},y_{0},z_{0})not =0}
hx′(x0,y0)=−fx′(x0,y0,z0)fz′(x0,y0,z0) et hy′(x0,y0)=−fy′(x0,y0,z0)fz′(x0,y0,z0){displaystyle h_{x}^{prime }(x_{0},y_{0})=-{frac {f'_{x}(x_{0},y_{0},z_{0})}{f'_{z}(x_{0},y_{0},z_{0})}} mathrm {et} h_{y}^{prime }(x_{0},y_{0})=-{frac {f'_{y}(x_{0},y_{0},z_{0})}{f'_{z}(x_{0},y_{0},z_{0})}},}
 .
.L'équation du plan tangent s'écrit alors
(x−x0)fx′(x0,y0,z0)+(y−y0)fy′(x0,y0,z0)+(z−z0)fz′(x0,y0,z0)=0{displaystyle (x-x_{0})f'_{x}(x_{0},y_{0},z_{0})+(y-y_{0})f'_{y}(x_{0},y_{0},z_{0})+(z-z_{0})f'_{z}(x_{0},y_{0},z_{0})=0}
 ,
,ou, sous forme vectorielle,
M0M→⋅grad f(M0)=0{displaystyle {overrightarrow {M_{0}M}}cdot mathbf {grad} ~f(M_{0})=0}
 .
.
Propriétés métriques |
Normale à une surface |
Le plan tangent à la surface S{displaystyle S,}


On appelle normale à la surface S{displaystyle S,}
Ses équations sont :
x−x0∂(y,z)∂(u0,v0)=y−y0∂(z,x)∂(u0,v0)=z−z0∂(x,y)∂(u0,v0){displaystyle {frac {x-x_{0}}{frac {partial (y,z)}{partial (u_{0},v_{0})}}}={frac {y-y_{0}}{frac {partial (z,x)}{partial (u_{0},v_{0})}}}={frac {z-z_{0}}{frac {partial (x,y)}{partial (u_{0},v_{0})}}}}
 ,
,avec, par exemple, le jacobien ∂(y,z)∂(u0,v0){displaystyle {frac {partial (y,z)}{partial (u_{0},v_{0})}}}

Dans le cas où la surface S{displaystyle S,}
x−x0p=y−y0q=z−z0−1{displaystyle {frac {x-x_{0}}{p}}={frac {y-y_{0}}{q}}={frac {z-z_{0}}{-1}},}

Dans le cas où la surface S{displaystyle S,}

(x−x0)fx′(x0,y0,z0)=(y−y0)fy′(x0,y0,z0)=(z−z0)fz′(x0,y0,z0){displaystyle {frac {(x-x_{0})}{f_{x}^{prime }(x_{0},y_{0},z_{0})}}={frac {(y-y_{0})}{f_{y}^{prime }(x_{0},y_{0},z_{0})}}={frac {(z-z_{0})}{f_{z}^{prime }(x_{0},y_{0},z_{0})}},}
 ,
,ou, sous forme vectorielle :
M0M→=ρ⋅grad f(M0),ρ∈R{displaystyle {overrightarrow {M_{0}M}}=rho cdot mathbf {grad} ~f(M_{0}),rho in mathbb {R} }
 .
.
Intersection de deux surfaces |
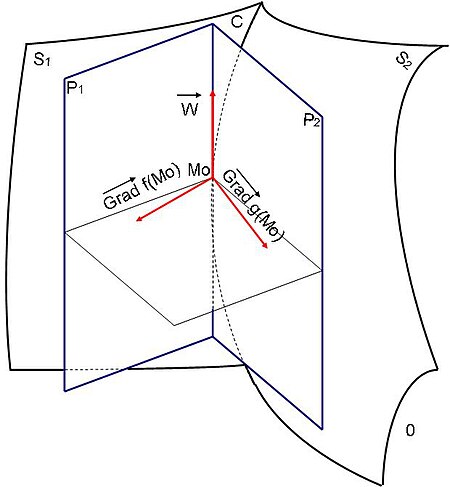
Soit la courbe C{displaystyle C,}


S1↦f(x,y,z)=0{displaystyle S_{1}mapsto f(x,y,z)=0}, et S2↦g(x,y,z)=0{displaystyle S_{2}mapsto g(x,y,z)=0}
.
Ces deux surfaces admettent chacune un plan tangent en M0(x0,y0,z0){displaystyle M_{0}(x_{0},y_{0},z_{0})}

La droite résultant de l'intersection des plans P1{displaystyle P_{1},}
Elle admet pour vecteur directeur :
W→=grad f(M0)∧grad g(M0){displaystyle {overrightarrow {W}}=mathbf {grad} ~f(M_{0})wedge mathbf {grad} ~g(M_{0})}

Soit l'équation :
x−x0∂(f,g)∂(y0,z0)=y−y0∂(f,g)∂(z0,x0)=z−z0∂(f,g)∂(x0,y0){displaystyle {frac {x-x_{0}}{frac {partial (f,g)}{partial (y_{0},z_{0})}}}={frac {y-y_{0}}{frac {partial (f,g)}{partial (z_{0},x_{0})}}}={frac {z-z_{0}}{frac {partial (f,g)}{partial (x_{0},y_{0})}}}}

L'équation du plan normal à C{displaystyle C,}
Son équation est :
- |x−x0∂f∂x(M0)∂g∂x(M0)y−y0∂f∂y(M0)∂g∂y(M0)z−z0∂f∂z(M0)∂g∂z(M0)|=0{displaystyle {begin{vmatrix}x-x_{0}&{frac {partial f}{partial x}}(M_{0})&{frac {partial g}{partial x}}(M_{0})\y-y_{0}&{frac {partial f}{partial y}}(M_{0})&{frac {partial g}{partial y}}(M_{0})\z-z_{0}&{frac {partial f}{partial z}}(M_{0})&{frac {partial g}{partial z}}(M_{0})end{vmatrix}}=0,}

Voir aussi |
Bibliographie |
Michèle Audin, Géométrie (chap. 8), Belin 2008, (ISBN 2-7011-2130-2)
Articles connexes |
- Surface de révolution
- Surface réglée
- Dérivation vectorielle
- Propriétés métriques des droites et plans
- Gradient
- Intégrale de surface
- Géométrie différentielle des surfaces
 Portail de la géométrie
Portail de la géométrie


